ロボットに期待する役割は4点
人間が「行く」前にロボット点検技術によりスクリーニング
――着任してから変えたことは
新田 当初の評価では評価項目を明示せずコメント形式だったため評価手法が曖昧でした。そこで私が着任した2年目からは評価項目を明示し、開発者へのフィードバックの観点からも、数を増やし具体的にました。検証フィールドは蒲原高架橋などでした。
点検作業においてロボットに期待する役割は、点検箇所に行く(人が近接することが困難な点検箇所に近接)、見る・撮る(写真や動画を取得する)、検出する(損傷を見つけ出し必要な情報を把握する)、記録(損傷の程度や位置などを確認しやすく整理)するという4つに分けられます。
例えば「行く」については飛行型、懸架型、車両型、ポール型、その他といったタイプがあります。「見る・撮る」についても解像度やレンズなどのカメラ本体の性能、移動機構に装着する際のマウント方法、撮影方法での工夫などにタイプに分けました。「検出する」については、画像や打音などのデータから損傷を識別し、損傷の程度を表すサイズや長さなど定量的および色や表面状態など定性的な情報を解析することを求めました。「記録する」については各応募者から提出された点検調書に記された損傷図と損傷写真が記録としての品質を有するかで判断しました
そのうえで評価項目も細かすぎだと思われるかもしれませんが、基本要件という項目を作りました。調書の作成が支援できる、損傷情報が収集できる、近づいていけるか、点検効が良いか、点検の際の安全性を担保できるか、点検時の安定性(太陽光や風などからの影響を受けにくいか)、効率・正確さ、作業性、汎用性、性能保証の10項目です。各項目で4段階に分けて採点し、評価しました。
例えばルーチェサーチの「SPIDER&Giraffe」は良い技術です。人間が操縦するため100m離れたところでは操縦できませんが、蒲原高架橋では非常に良い評価が出ていました。それでも近接目視で取得できた漏水や遊離石灰などのデータは取得できていませんでした。総合評価としては「安定して飛行し、画像を取得する状態を確認した……」などとコメントされ鮮明な画像を取得しながら、遊離石灰は確認できなかったわけですが、画像から損傷を検出する技術が今後の課題と思われる、とかなり細かく書いて出したわけです。

SPIDER
この結果を踏まえて、橋梁では7つ、トンネルでは4つの技術を次世代社会インフラ用ロボット現場検証委員会で一定の評価を得た技術 「課題の解決を前提に試行的導入に向けた検証を推薦」技術と同等以上と評価しました(下図)。しかし、同じ技術であっても使う人によっては精度が全然違うこともあります。これは熟練度やセンスが大きく左右します。

点検を委託する施設管理者は当然、そういうことで大丈夫か? ということになります。点検結果の品質が一番の関心事ですから。
評価された技術であっても技術開発はまだまだこれからも継続していかなくてはなりません。一方で管理者はロボット点検技術を使うことが目的ではなく、道路利用者に対してきちんとした維持管理をしているという結果と説明ができるようになりません。そのためのエビデンスを点検結果から説明できるという状況を作っていかないと、こういったロボットの活用は進んでいきません。
3つ目は、開発者とコンサルタントの事業性です。どんなに精度が高くても時間やコストがかかりすぎるのでは使えません。
この3つは追求していく必要があります。SIPは終りましたが、それで完了ではなく、ロボット点検技術においては、ここが出発点になるんだという気構えが大事です。
今の点検の仕方は調査するために足場などの準備工が必要です。調査のために河川だったら漁協、上面は警察協議などいろいろな関係者との調整も必要です。現場では近接目視、打音検査を行い、劣化部にはクラックスケールで測ったうえで記録用にチョークでしるしをつけなくてはなりません。さらに野帳に記入する必要もあります。それらを現地で行い、事務所に帰ってきてから報告書を作っています。この一連の作業をできるだけ軽減したいわけです。そのためには近接目視を大幅に絞り込み、人間が「行く」前にロボット点検技術によりスクリーニングしたうえで、点検箇所を絞り込んで、記録もできるようにしたいのです。

点検ロボットの使い方
しかし、当初は近接目視を基本とする点検要領の考え方に合わないじゃないか? と技術基準への不整合を指摘されました。しかし解釈を厳密に行うと、「近接目視評価を基本とする」と書いてある。基本の例外とは物理的点検困難箇所であり、例えば土の中に埋まっている箇所を指すと。ロープアクセスで点検するような近接が難しい個所は物理的困難箇所に該当しないとの考えでした。
そのため近接目視の下でロボットが適用できる場面をまとめる中で「当面」という言葉を使いました。近接目視点検は全面で行いますが、その上でロボットを用いて全部記録するということです。「なんだ単なるスケッチマシーンか?」という声も聞こえてきました。思う所はありましたが、そこは「ロボット点検技術を推し進めるために之も有り」と考えて、記録にロボットを使うと非常に有効です、と提案しました。高精細な画像が取れれば、画像からクラックの長さを測ることができ、チョーキングをする必要もなくなったりしますよ、と。場所さえ大雑把に印をつけて起きてくれれば、あとは画像で判断できますよ、と。
それでも、ロボットを利用すると手間が一つ増えるだけじゃないか、結局人間のやる作業は全然減らないではないか? との声もあります。
それに対して、画像を用いてコンピュータ上でクラックの長さを測ったりできるので、ょーキングや野帳に記入するコストや手間を減らせるのではないですか、と提案しました。近接目視で計測とかチョーキングとかのアタリをつけて、ロボットで最大ひび割れ幅やクラックの長さなどを効率的に画像でチョーキングするというやり方はどうかという話です。導入にはこうした疑義を一つ一つ丁寧に解消していくことが必要でした。

技術の現状に合わせてそれを取り込む努力が必要
先行するJシステム
――新たな技術を獲得するためには、官側も学習しなければなりませんね
新田 ロボットの性能は千差万別であるため、評価をしないと使えないことは確かです。しかし完璧な性能を発揮するまでロボットは使わないというやり方をパブリックセクターで行ってしまうと、永遠に実用化しないし、段階的にビジネス化することが難しく、開発者も付き合いきれなくなります。技術の現状に合わせて、それを活かし取り込む努力を管理者も進めるべきです。
――先ほど「スクリーニングとおっしゃいましたが、具体的な技術はありますか
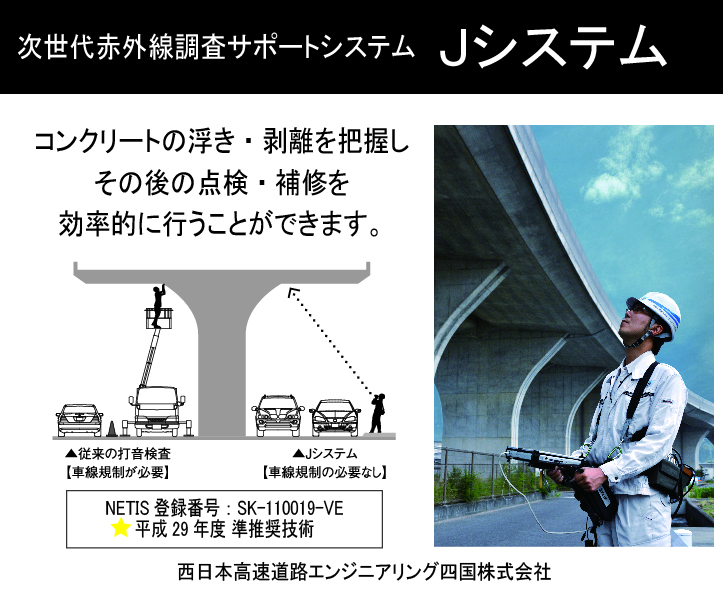
新田 例えば、西日本高速道路エンジニアリング四国などが開発したJシステムがあります。
コンクリートのひび割れ、浮き・剥離を検出するシステムとして赤外線カメラを使って熱画像を取得して解析するシステムです。ユースケース(使用場面)として設定した構造物のスクリーニングで100%の検出率を発揮しました。ここでいう「検出率」の分母は、人間が打音検査で見つけた変状箇所との一致率です。もちろん、疑いがあっても損傷していないケースもありますが、そうした安全側の間違いは許容します。これはシステムの検出率とヒット率という言葉を使っているのですが、ヒット率(安全側の間違いも含む)で多いほうの誤差があっても、検出率に誤差が無ければいいのです。
検証では、全部打音で行うと3300㎡も行わなければいけないところ、Jシステムを用いることで、打音範囲を2%に絞ることができました。これでも安全側に絞っているので、実際に異常があったのは、その中の2割に過ぎませんでした。スクリーニングという発想で行うと相当な効率化が実現できる。これを重要なユースケースとみなしています。
新しい技術を使う時には、こうしたユースケースと性能要求(リクワイメント)が必要です。技術に対してどんな使い方をするのか明確にユーザーは示したうえで、そういう使い方をする上での性能を示してくれと。ユースケースとリクワイメントをセットにして技術を評価することが重要です。ひび割れの検出率100%といった時でもひび割れの長さ(総ひび割れ延長を分母にして、ロボットで撮影できた総ひび割れ延長を分子にする)を100%までは考えていません。それは近接目視でやればいいんですから。
技術は評価の仕方が非常に重要です。ここでは検出率は100%です。この定義は安全側に取っていれば全部100%ですよね。ヒット率26%でもいいのです。こういうリクワイメントやユースケースをどんどん作ってNETISに登録してほしいと思います。