

斜張橋斜材点検装置や超望遠レンズによる外観検査技術などを用いる
東北地整・国総研 気仙沼湾横断橋で点検支援技術を活用した点検を実施
国土交通省東北地方整備局と国土技術政策総合研究所(国総研)は11月24日、気仙沼湾横断橋で点検支援技術を活用した点検の実施状況を公開した。宮城県道路メンテナンス会議の構成員など、約30名が参加した。2021年3月に供用された同橋は、陸上部が鋼3+7径間連続箱桁橋(664m)、海上部が鋼3径間連続斜張橋(680m)で、今年度、初回定期点検を実施している。点検受託会社は、復建技術・大日本コンサルタント設計共同体。

公開はP11橋脚で行われた(大柴功治撮影。注釈なき場合は、以下同)
東北地方整備局の石津健二道路部道路保全企画官は挨拶で、「同橋のような構造が複雑で大規模な橋梁では健全性の診断に必要な情報について、部位・部材などに応じてさまざまな点検支援技術を活用することにより効率的、効果的に取得でき、点検の質の向上や省力化が期待される。東北地整と国総研では、点検支援技術の活用も含めて点検方法の検討を進めてきた」と述べた。点検支援技術の試行結果も踏まえて、同橋の定期点検・異常時点検マニュアルを来年度末に取りまとめる。また、得られた知見を点検支援技術性能カタログの性能評価項目などにフィードバックするとともに、橋梁定期点検要領の次期改定にも反映していく。
当日公開された点検支援技術は、①斜張橋斜材点検装置「コロコロチェッカー」、②超望遠レンズによる高層構造物の外観検査技術、③ドローン・AIを活用した橋梁点検・調書作成支援技術、④マグネット式全方位点検ロボット「MagBug」――の4技術だ。①~③は点検支援技術性能カタログに掲載済みである。なお、①については強風により、当日の実点検は行われなかった。


斜張橋斜材点検装置「コロコロチェッカー」(左)/超望遠レンズによる高層構造物の外観検査技術(右)(左・右写真:東北地方整備局提供)


ドローン・AIを活用した橋梁点検・調書作成支援技術(左)/マグネット式全方位点検ロボット「MagBug」(右)(右写真:東北地方整備局提供)
各技術の点検箇所と取得するデータは、①がケーブル(一般部・定着部)でケーブル被覆の外観・傷の有無、定着部表面の状態、②が主塔外面(上部正面)、③が主塔外面(下部側面、下部正面)、主桁外面(下面)、④が主塔外面(上部側面)で、②~④は塗膜状態となっている。
斜張橋斜材点検装置「コロコロチェッカー」
西松建設と佐賀大学理工学部理工学科の共同開発技術。斜張橋の斜材保護管上を遠隔操作で自走し、その全周を4台の約207万画素フルハイビジョンカメラで動画撮影をして表面の損傷状況を調査する。装置は1辺500mmの立方体で重量は30kg。作業員ふたりでの運搬、ケーブルへの装着ができ、交通規制は必要としない。最大走行速度は分速6m(傾斜角40°)、斜材の最大傾斜角65°まで走行ができ、2時間以上の連続運転が可能。通常の斜材保護管の直径90~230mmに対応しており、1mm以上のすり傷やひっかき傷、汚れなどの損傷が確認できる。装置外側には3台のカメラを設置し、定着部表面の状態も画像取得する。これまでに6橋での受注実績がある。
【関連記事】
・西松建設「コロコロチェッカー」 近接目視と同レベルの斜材保護管調査を実現


斜材保護管上を移動するコロコロチェッカー(東北地方整備局提供)/外観/内部。奥側の駆動車輪4輪で走行する。手前は従動車輪
超望遠レンズによる高層構造物の外観検査技術
アルファ・プロダクトと長大の共同開発技術。4,575万画素のデジタル1眼レフカメラと200~500mmの超望遠レンズを使用することにより、撮影距離40mで1ピクセルあたり0.2mm、同100mで同0.5mmの精度を持ち、100mの距離では5mmの点での画像識別が可能となっている。撮影した画像はPCのモニターで拡大表示し、細部を詳細に見ることで鋼構造物の塗膜状態、腐食、欠損などを把握することができる。
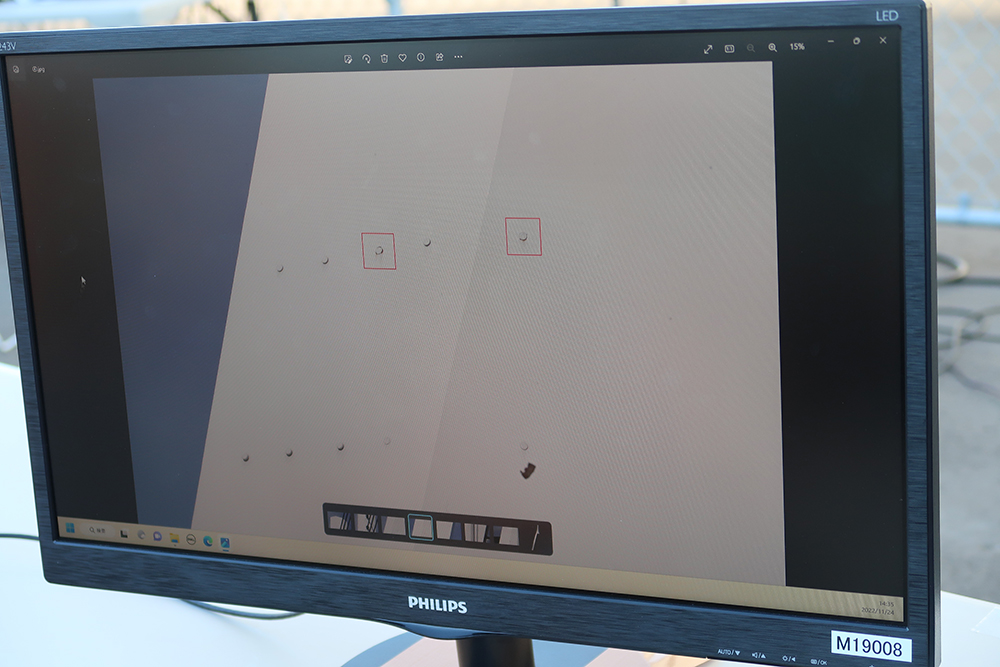
超望遠レンズで撮影した画像
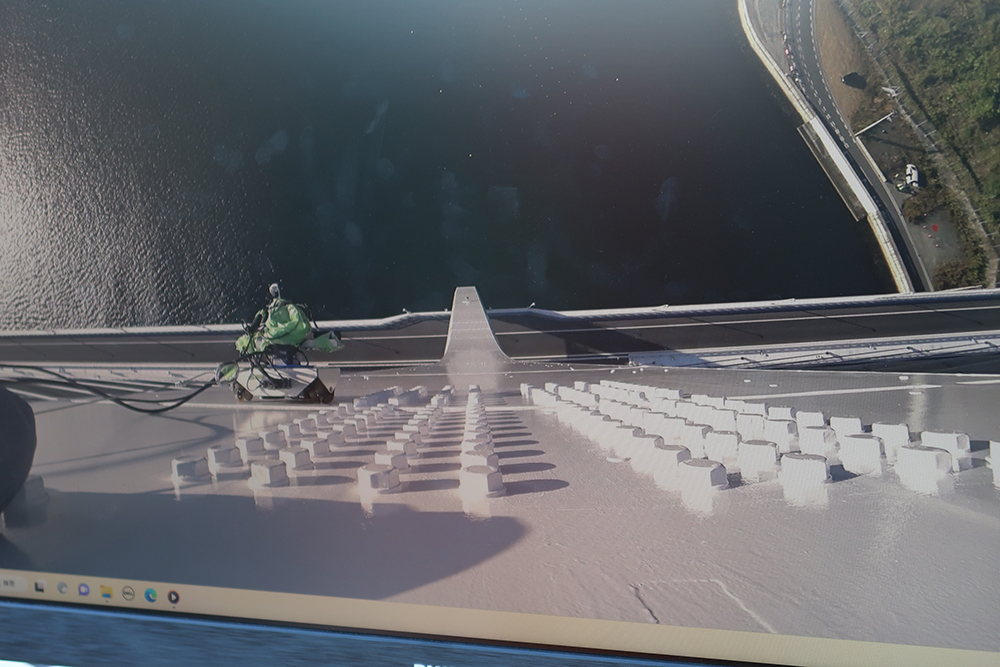
ドローン・AIを活用した橋梁点検・調書作成支援技術
インフラ・ストラクチャーズおよび東北大学大学院工学研究科インフラ・マネジメント研究センター、伊藤建設、PAL構造の共同開発技術。ドローンで対象部位を近接写真撮影した映像に対して、AIによる画像解析を行い、変状を抽出する。ひび割れや防食機能の損傷、剥離・鉄筋露出などの変状が対象となる。被写体からの距離4mで1mm程度の変状が確認可能。ドローンは、基本的にGNSS測位により自立飛行が可能だが、現場条件により人が操縦して飛行を行う。


ドローン本体
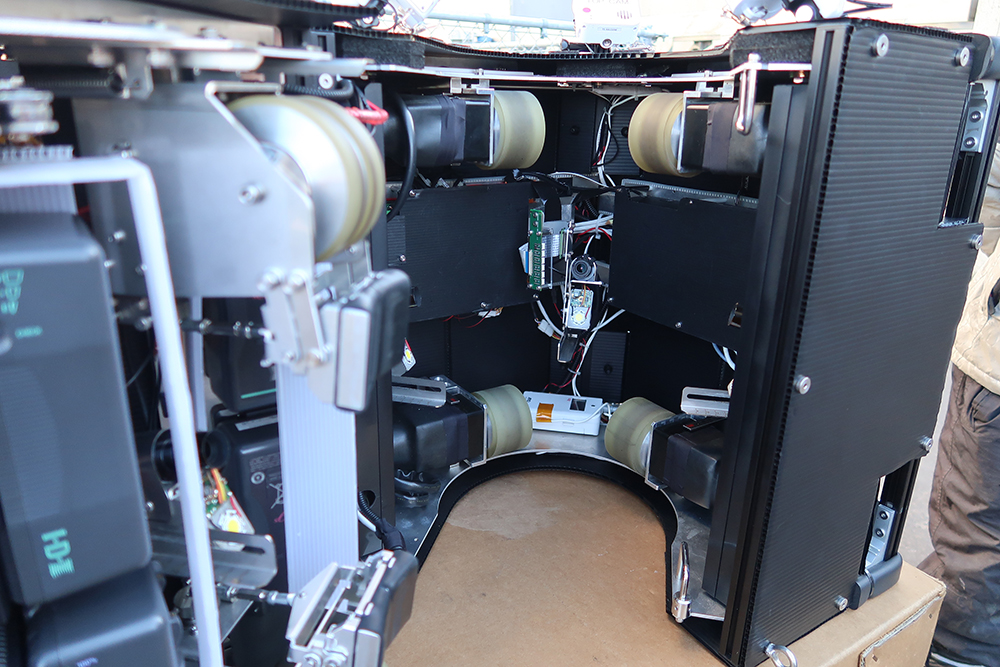
マグネット式全方位点検ロボット「MagBug」
イクシス開発技術。オムニホイール3輪とマグネットを組み合わせることで、金属製の壁面を全方位に移動できるロボット。有線により遠隔操縦を行う。近接目視用のカメラでの画像検査では1mm程度の変状が確認できる。画像検査以外にも、別途センサーを搭載することにより、板厚測定や超音波探傷検査が可能であることも特徴だ。


主塔外面を移動するMagBug/外観。アタッチメントに各種センサーを搭載することが可能/裏面。マグネットとオムニホイールで金属製の壁面を全方位に移動